
About Me
I am a master student at Southern University of Science and Technology (SUSTech), advised by Dr. Wei Zhang and Dr. Hua Chen. Before that, I obtained my B.E. degree in Robotics Engineering in 2021 from SUSTech. Currently, my research interests lie in perceptive locomotion of legged robot and deep reinforcement learning.
Publications
| Overview | |
|---|---|
 | GeoReF: Geometric Alignment Across Shape Variation for Category-level Object Pose Refinement Linfang Zheng, Tze Ho Elden Tse, Chen Wang, Yinghan Sun, Esha Dasgupta, Hua Chen, Aleš Leonardis, Wei Zhang, Hyung Jin Chang CVPR, 2024 |
 | Multi-Resolution Planar Region Extraction for Uneven Terrains Yinghan Sun, Linfang Zheng, Hua Chen, Wei Zhang ICRA, 2024 [arXiv] |
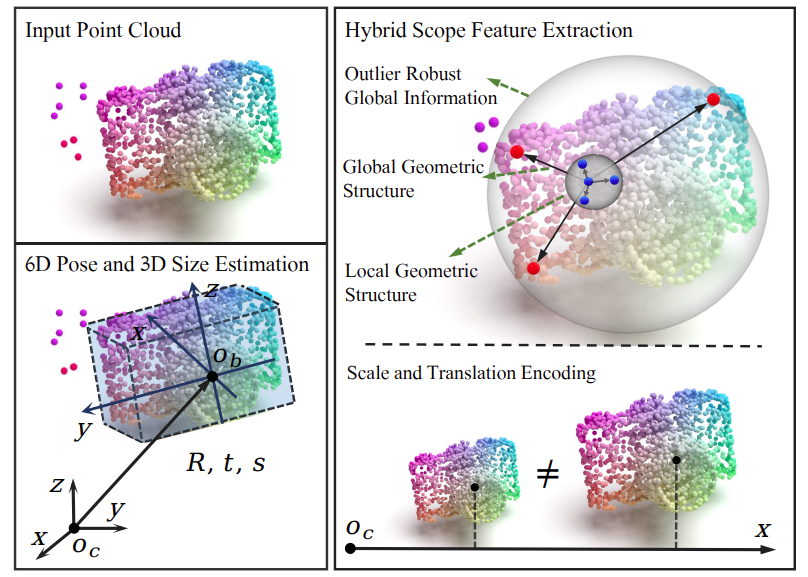 | HS-Pose: Hybrid Scope Feature Extraction for Category-level Object Pose Estimation Linfang Zheng, Chen Wang, Yinghan Sun, Esha Dasgupta, Hua Chen, Aleš Leonardis, Wei Zhang, Hyung Jin Chang CVPR, 2023 [project page] [paper] [arXiv] [code] [video] |
Selected Projects
| Overview | |
|---|---|
 | Blind Locomotion on Uneven Terrains for Quadrupedal Robot Part of my current research project. |
 | Quadruped Locomotion Using Convex Model Predictive Control Implemented the MIT’s solution using Python. [code] |
 | Kinematics-Aware Bipedal Robot Switch Light Second Prize | WAIC 2020 · Humanoid Service Robot Simulation Competition |
 | 3-DoF Ball on Plate Using Closed Loop Stepper Motors Yinghan Sun, Daifeng Li, Shilong Yao Course project in ME425 Sensing Technology, SUSTech |
 | A Gecko-inspired Soft-and-rigid Climbing Robot Yinghan Sun, Zhuotong Yu, Yichen Song, Shaoqian Li, Bowen Shen Course project in ME337 Advanced Actuation for Robots, SUSTech |
Teaching
- Teaching assistant in ME424 Modern Control and Estimation, SUSTech.
[course website] [recordings (Youtube)] [recordings (Bilibili)]
Course introduction: This course will introduce the students to the fundamental concepts and methods in modern control and estimation theory. Topics include state-space modeling of dynamical systems, least-square estimation and system identification, state-feedback and output-feedback controller design, observer design, linear quadratic regulators, and Kalman filter. The course will also connect these control and estimation methods to applications in robotics, mechanical, electrical, and aerospace systems.